了解巴鲁夫机械手臂抓具简化方案,为升级做准备
由于23芯电缆的弯曲韧性相对较低,因此造成的停机会损失客户的时间。电缆线通过端口接入机器人的终端设备,然而终端设备总共要连接多个需要回传至PLC的输入信号。
因此客户希望的解决方案是需要能简便的与其它机器人相整合,同时又有一定的灵活性能满足客户所安装的其它不同的终端执行器的需求。
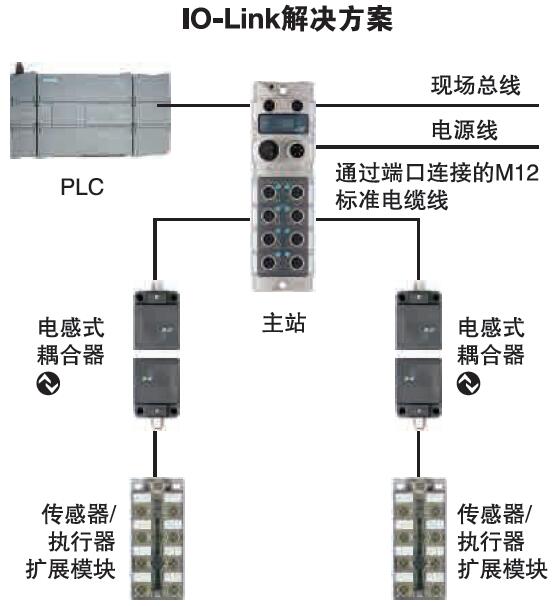
巴鲁夫IO-Link网络主站及电感式耦合器的优势:
电感式耦合器通过相隔的间隙传输信号及能量;免除了终端设备的直接接触
减少意料之外的停机时间
解决了因电缆线破损而导致的停机问题
满足了输入的需求
该解决方案还可用于其他类似的机器人系统